Electric Dollar Store


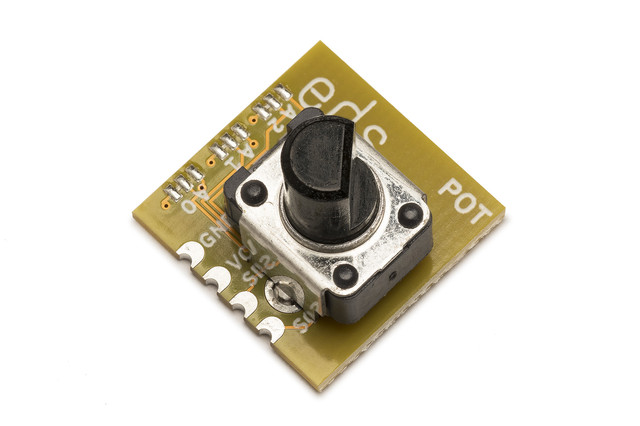
POT is a high-quality twist potentiometer coupled with an I²C controller which reports the instantaneous rotary position.
The I²C protocol is straightforward. The device has 255 locations. Reading from location N gives the rotary position scaled to the range (0..N). So for example reading from 100 gives a position value between 0 (fully counter-clockwise) to 100 (fully clockwise). In addition, reading from location 0 gives the knob rotation as a 16-bit unsigned value.
import sys
import struct
import time
from i2cdriver import I2CDriver, EDS
if __name__ == '__main__':
i2 = I2CDriver(sys.argv[1])
d = EDS.Pot(i2)
while 1:
percentage = d.rd(100)
r = d.raw()
print("%3d/100 raw=%3d" % (percentage, r))
time.sleep(.05)
#include <Wire.h>
byte pot_read(byte scale)
{
Wire.beginTransmission(0x28);
Wire.write(scale);
Wire.endTransmission(false);
Wire.requestFrom(0x28, 1);
return Wire.read();
}
void setup() {
Serial.begin(115200);
Wire.begin();
}
void loop() {
Serial.println(pot_read(100));
delay(20);
}
from machine import I2C
import struct
import time
class Pot:
""" POT is an analog knob potentiometer """
def __init__(self, i2, a = 0x28):
self.i2 = i2
self.a = a
def raw(self):
"""
Return the current knob rotation as a 16-bit integer.
"""
return struct.unpack("<H", self.i2.readfrom_mem(self.a, 0, 2))[0]
def rd(self, r):
"""
Return the current knob rotation, scaled to the range 0 .. r
inclusive. For example rd(100) returns a value in the range 0 to 100.
"""
return self.i2.readfrom_mem(self.a, r, 1)[0]
def main():
i2 = I2C(1, freq = 100000)
d = Pot(i2)
while True:
percentage = d.rd(100)
print("%3d/100 raw=%3d" % (percentage, d.raw()))
time.sleep(.05)
| Default I²C address | 0x28 (0b0101000) |
| Current consumption (typ.) | 5 mA |
| Vcc | 2.2 - 3.6 V |