Electric Dollar Store

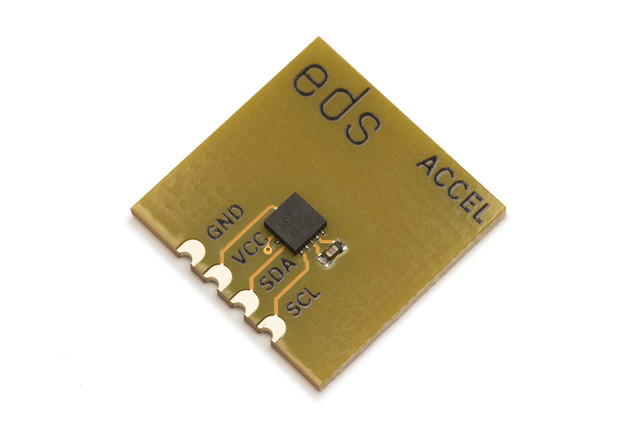
The RT3000 is a low power and high accuracy 3 axis acceleration sensor. It continuously senses the acceleration and reports it as a 16-bit (x,y,z) triple. In addition, it has orientation and motion alarms, a self-test mode, and low-power and high accuracy modes.
import sys
import struct
import time
from i2cdriver import I2CDriver, EDS
if __name__ == '__main__':
i2 = I2CDriver(sys.argv[1])
i2.scan()
d = EDS.Accel(i2)
while True:
print("x=%+.3f y=%+.3f z=%+.3f" % d.measurement())
#include <Wire.h>
class accel {
int a;
public:
float x, y, z;
void begin(byte _a = 0x19) {
a = _a;
regwr(0x20, 0b01000111); // CTRL_REG1: 50 Hz, enable X,Y,Z
regwr(0x23, 0b00000000); // CTRL_REG4: High resolution mode
}
void regwr(byte addr, byte val) {
Wire.beginTransmission(a);
Wire.write(addr);
Wire.write(val);
Wire.endTransmission();
}
byte regrd(byte addr) {
Wire.beginTransmission(a);
Wire.write(addr);
Wire.endTransmission(false);
Wire.requestFrom(a, 1);
while (Wire.available() < 1)
;
return Wire.read();
}
int16_t rd16(byte addr) {
int16_t r = regrd(addr) | (regrd(addr + 1) << 8);
Serial.println(r);
return r / 16384.0;
}
void read() {
while ((regrd(0x27) & 8) == 0)
;
x = rd16(0x28);
y = rd16(0x30);
z = rd16(0x32);
}
};
accel Accel;
void setup() {
Serial.begin(115200);
Wire.begin();
Accel.begin();
}
void loop() {
Accel.read();
Serial.print(Accel.x); Serial.print(' ');
Serial.print(Accel.y); Serial.print(' ');
Serial.print(Accel.z); Serial.println();
}
from machine import I2C
import struct
import time
class Accel:
""" ACCEL is a Richtek RT3000C 3-Axis Digital Accelerometer """
def __init__(self, i2, a = 0x19):
self.i2 = i2
self.a = a
self.regwr(0x20, 0b01000111) # CTRL_REG1: 50 Hz, enable X,Y,Z
self.regwr(0x23, 0b00000000) # CTRL_REG4: High resolution mode
def regwr(self, memaddr, val):
self.i2.writeto(self.a, bytes((memaddr, val)))
def regrd(self, memaddr):
return self.i2.readfrom_mem(self.a, memaddr, 1)[0]
def measurement(self):
""" Wait for a new reading, return the (x,y,z) acceleration in g """
# Note that the RT3000A does not support multibyte
# reads. So must read the data one byte at a time.
while True:
STS_REG = self.regrd(0x27)
if STS_REG & 8:
regs = [self.regrd(i) for i in range(0x28, 0x2e)]
xyz = struct.unpack("<3h", bytes(regs))
return tuple([c / 16384. for c in xyz])
def main():
i2 = I2C(1, freq = 100000)
d = Accel(i2)
while 0:
print(d.regrd(0x27))
time.sleep(1)
while True:
print("x=%+.3f y=%+.3f z=%+.3f" % d.measurement())
| Default I²C address | 0x19 (0b0011001) |
| Current consumption (typ.) | 5 mA |
| Vcc | 3.3 V |